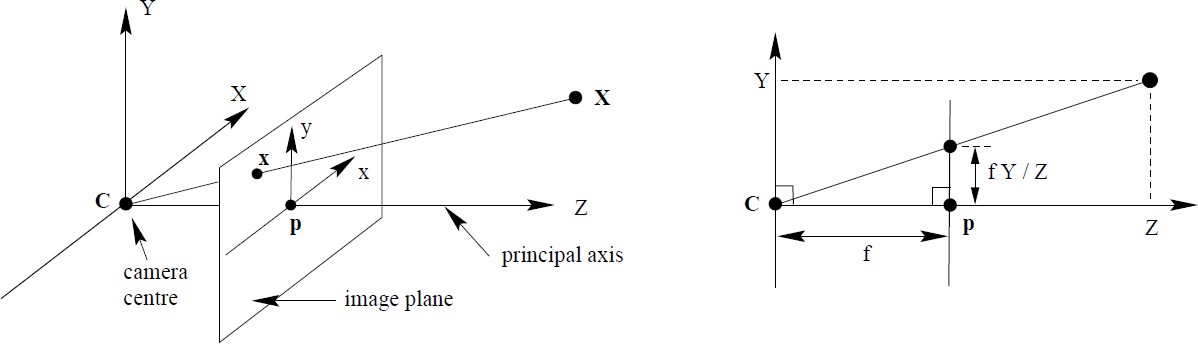
In this project, I use simple manual camera calibation method. The setup is as follows:


Assuming pin hole camera, we can utilize similar triangle methods(see below), and can come up with focal lengths equation: # fx = (dx/dX) * dZ , fy = (dy/dY) * dZ where dX, dY are the physical length & width of the object in view and dZ is the distance from object to camera. dx and dy are the corresponding pixel width & height of the object


import numpy as np#measure object width,height,distance in inches
obj_width = 18.75
obj_height = 13.5
obj_distance = 35.2#get object width,height in pixels
obj_img_width = 1784
obj_img_height = 1268fx3349.1626666666666
# fx = (dx/dX) * dZ , fy = (dy/dY) * dZ
fx = ( obj_img_width / obj_width ) * obj_distance
fy = ( obj_img_height / obj_height ) * obj_distance print(fx, fy)3349.1626666666666 3306.192592592593
Here we write a generic function that takes in the above params and gives us the camera matrix
# img_size if there has been any rescaling of the original image
def simple_calibration(img_size, full_img_size, focal_lengths ):
row,col = img_size
full_row, full_col = full_img_size
fx,fy = focal_lengths
fx = fx*col/full_col
fy = fy*row/full_row
K = np.diag([fx,fy,1])
K[0,2] = 0.5*col
K[1,2] = 0.5*row
return KK = simple_calibration((4032,3024), (4032,3024), (fx,fy) )Karray([[3.34916267e+03, 0.00000000e+00, 1.51200000e+03],
[0.00000000e+00, 3.30619259e+03, 2.01600000e+03],
[0.00000000e+00, 0.00000000e+00, 1.00000000e+00]])